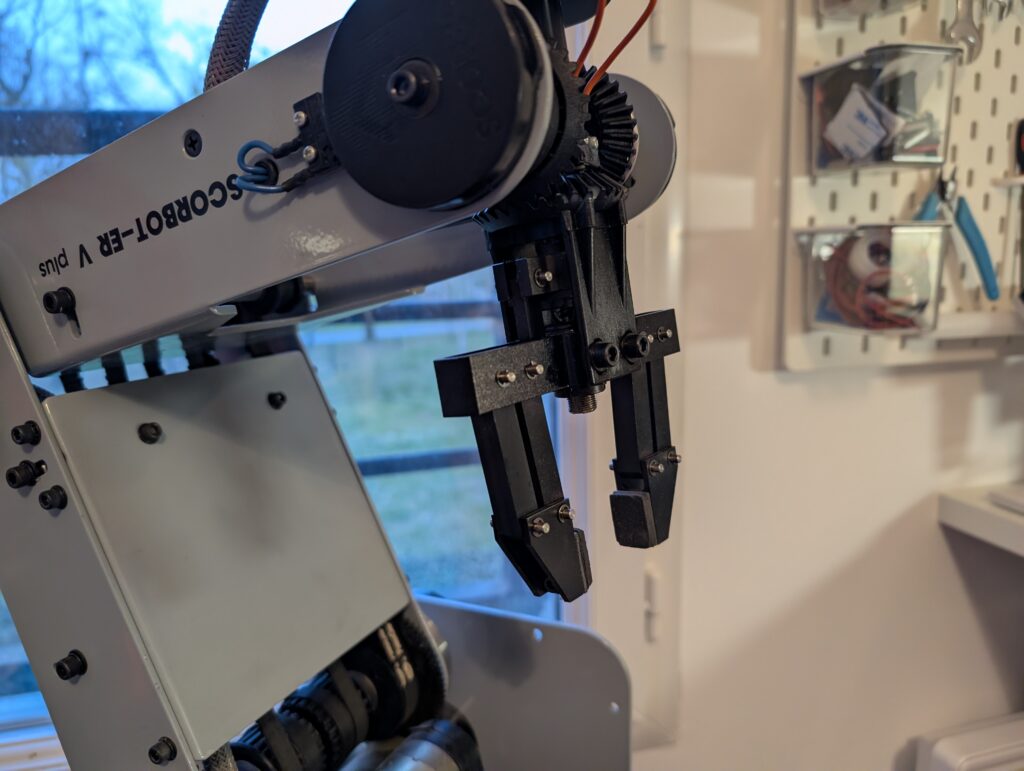
Aujourd’hui j’ai enfin pu tester la pince de mon Scorbot ER5 — pas encore tout le bras, uniquement le moteur de préhension, mais c’est une étape importante : vérifier le câblage, le driver et la chaîne WiFi → carte → moteur.
Ce que j’ai utilisé
- Un Arduino Mega avec une Motor Shield (Adafruit, librairie AFMotor) : c’est elle qui pilote le moteur DC de la pince en 12 V (via le connecteur du robot et les fils M1 / M2 prévus pour le gripper).
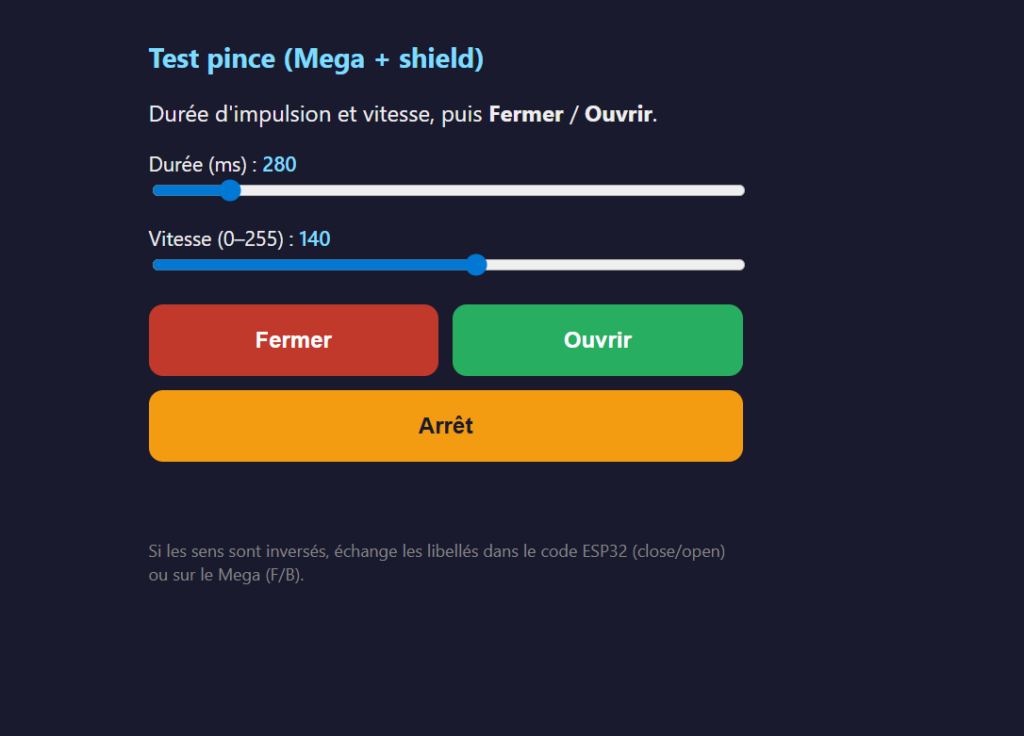
- Un ESP32 qui crée une interface web sur mon réseau WiFi : quelques curseurs (durée d’impulsion, vitesse) et des boutons du type « fermer / ouvrir / arrêt ».
- La liaison entre les deux : une liaison série (UART), comme un petit câble « dialogue » entre l’ESP32 et le Mega. L’ESP32 envoie des ordres texte ; le Mega les reçoit et commande la shield.
Pourquoi deux cartes ?
L’ESP32 est très à l’aise pour le WiFi et une page web. Le Mega, lui, gère bien les shields et les broches pour les moteurs. Dans mon montage, l’ESP32 ne pilote pas les moteurs directement : il envoie des commandes au Mega, et c’est le programme sur le Mega qui fait tourner (ou arrêter) la pince. C’est une architecture classique : interface d’un côté, exécution de l’autre.
Détail technique important (pour ceux qui bricolent)
Le Mega travaille en 5 V logique, l’ESP32 en 3,3 V. Pour le fil qui va du TX du Mega vers le RX de l’ESP32, il ne faut pas envoyer du 5 V brut : j’ai donc prévu un pont diviseur (deux résistances) pour ramener à environ 3,3 V. Dans l’autre sens (ESP32 → Mega), un fil simple suffit en général. Et surtout : masse commune entre les deux cartes.
Résultat
Premier contact concret avec la mécanique : la pince bouge selon les ordres depuis le téléphone ou le PC, avec des impulsions courtes pour ne pas forcer les butées en découverte. La suite sera d’brancher le reste des axes, les encodeurs, mais pour aujourd’hui — mission accomplie pour la pince.



