Dans cet article, je vais vous parler de la conception de mon robot à roues omnidirectionnelles, une réalisation cool qui combine modélisation, impression 3D et électronique !
Avantages des Roues Omnidirectionnelles
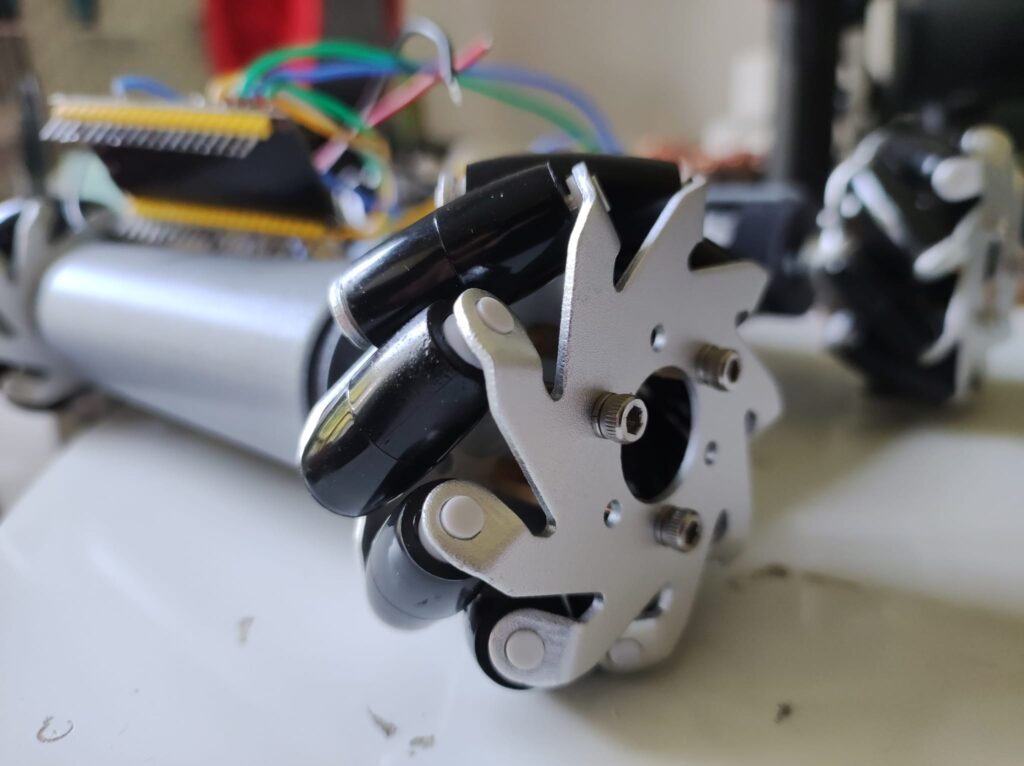
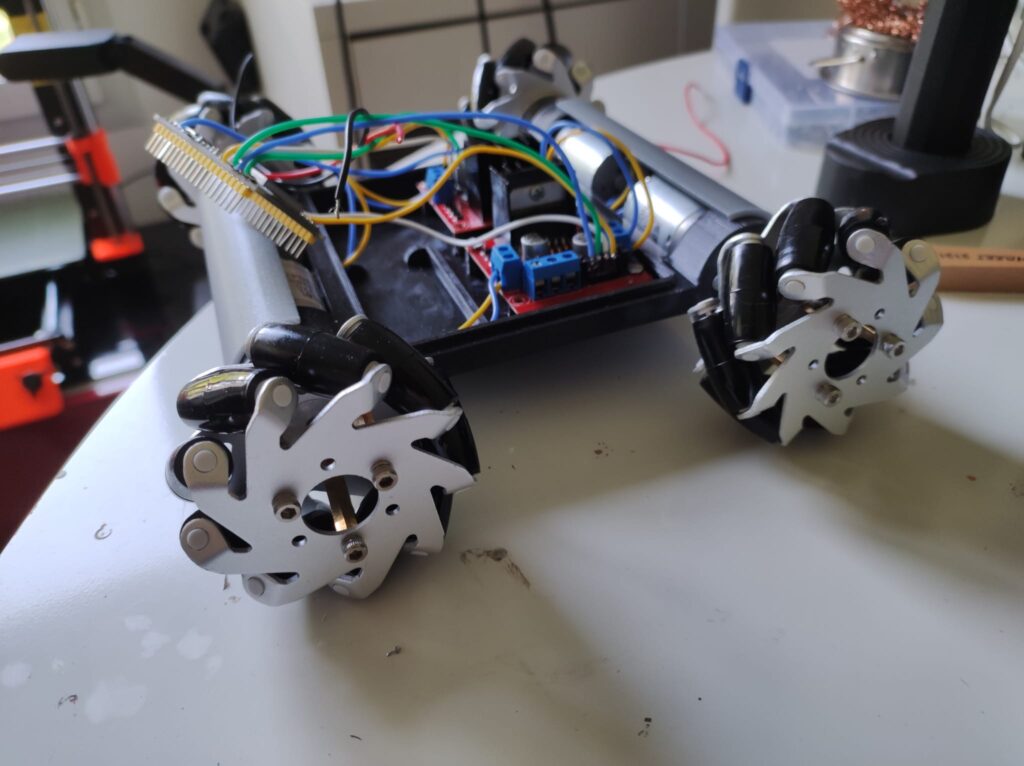
Les roues omnidirectionnelles offrent plusieurs avantages :
- Mouvement Multi-Directionnel : Elles permettent un mouvement fluide dans n’importe quelle direction sans avoir besoin de pivoter. Cela rend le robot extrêmement maniable, idéal pour des espaces restreints et les tâches complexes de navigation 🙂 ! Il faut compter 40 euros pour les 4 roues ( https://www.gotronic.fr/art-roue-omnidirectionnelle-gauche-fit0779-34180.htm ).
Il vous faut aussi des fixations de roues en axe de 4mm équivalent au diamètre de mes moteurs ( https://fr.aliexpress.com/item/1005006306920922.html?spm=a2g0o.order_list.order_list_main.5.558a5e5buS6NGQ&gatewayAdapt=glo2fra ).
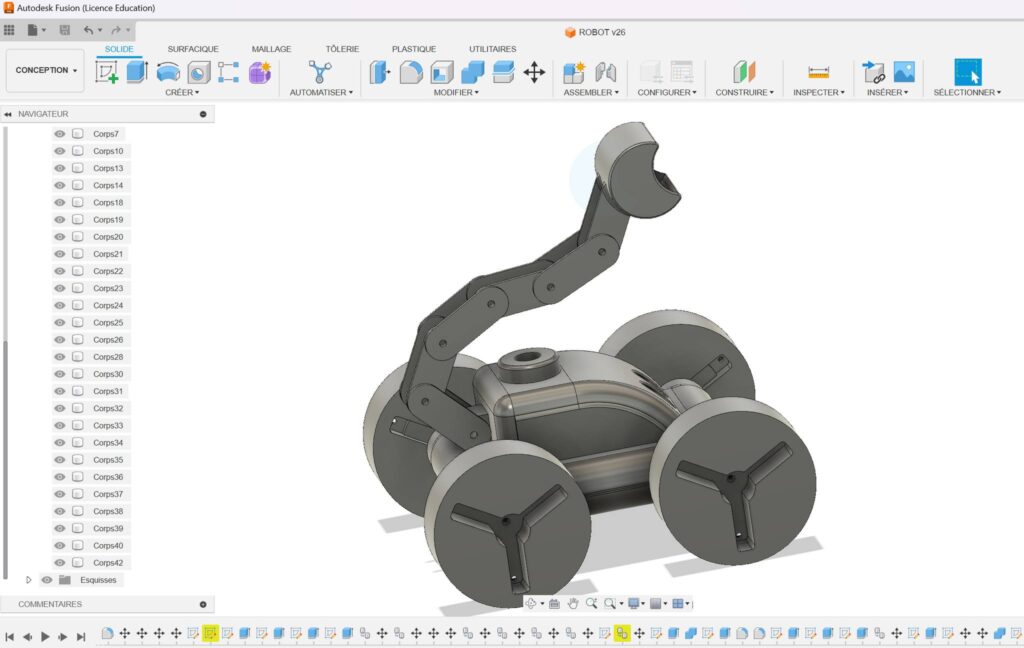
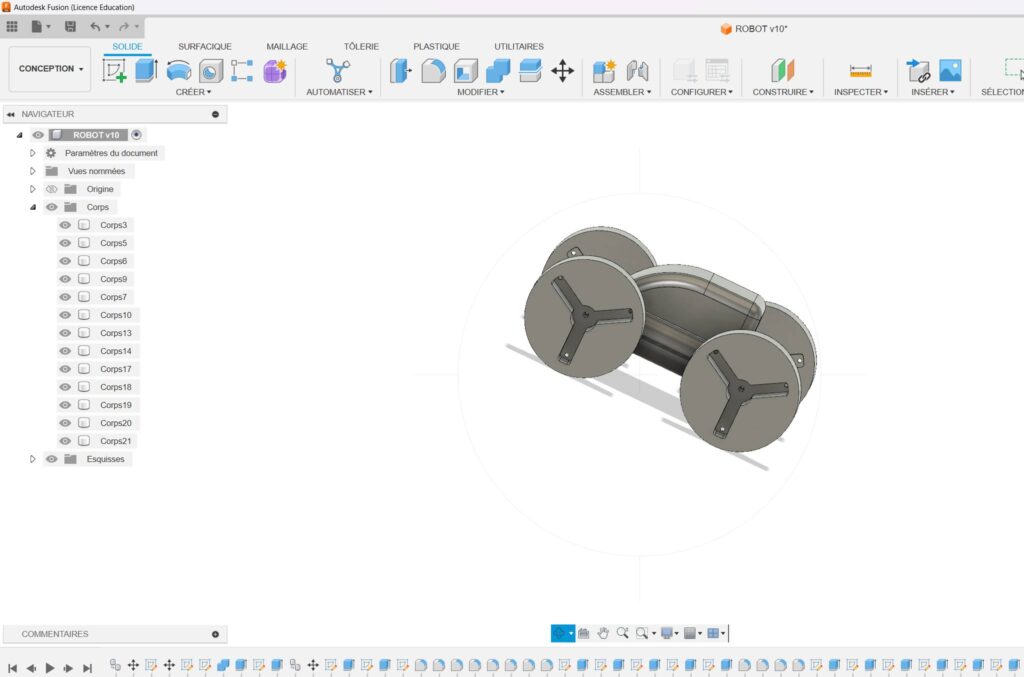
Modélisation sous Fusion 360
J’ai utilisé Fusion 360 pour modéliser le robot. Cet outil offre une interface intuitive et des fonctionnalités puissantes pour concevoir des pièces avec une grande précision. J’ai pu créer un design optimisé, intégrant les composants nécessaires tout en minimisant le poids et l’espace (enfin j’espère 🙂 ) !
Impression 3D avec PLA ArianePlast
Les pièces du robot ont été imprimées en PLA de la marque ArianePlast ( https://www.arianeplast.com/ ) sur une Prusa Mini. Le PLA est un matériau idéal pour ce type de projet grâce à sa facilité d’impression et à sa rigidité, il suffit largement à ce type de besoin.

Électronique Intégrée
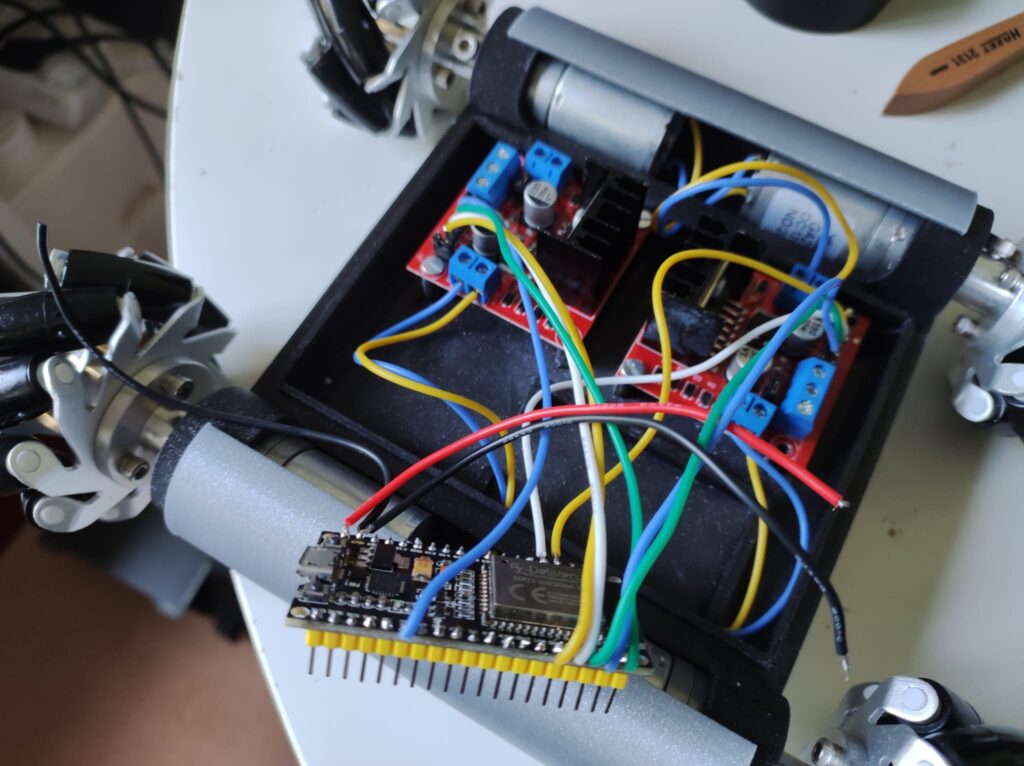
À l’intérieur du robot se trouvent des composants électroniques clés :
- ESP32 : Un microcontrôleur puissant qui gère la communication et le contrôle du robot. Sa connectivité Wi-Fi et Bluetooth permet une multitude d’applications. Je vais ensuite le dirigé via une application mobile qui communiquera en Wifi avec le robot ( https://fr.aliexpress.com/item/1005006336964908.html?spm=a2g0o.productlist.main.1.2c8028b3XKWPAR&algo_pvid=2d055b66-46d4-4ea8-bb28-37eadbf68fa0&utparam-url=scene%3Asearch%7Cquery_from%3A ).
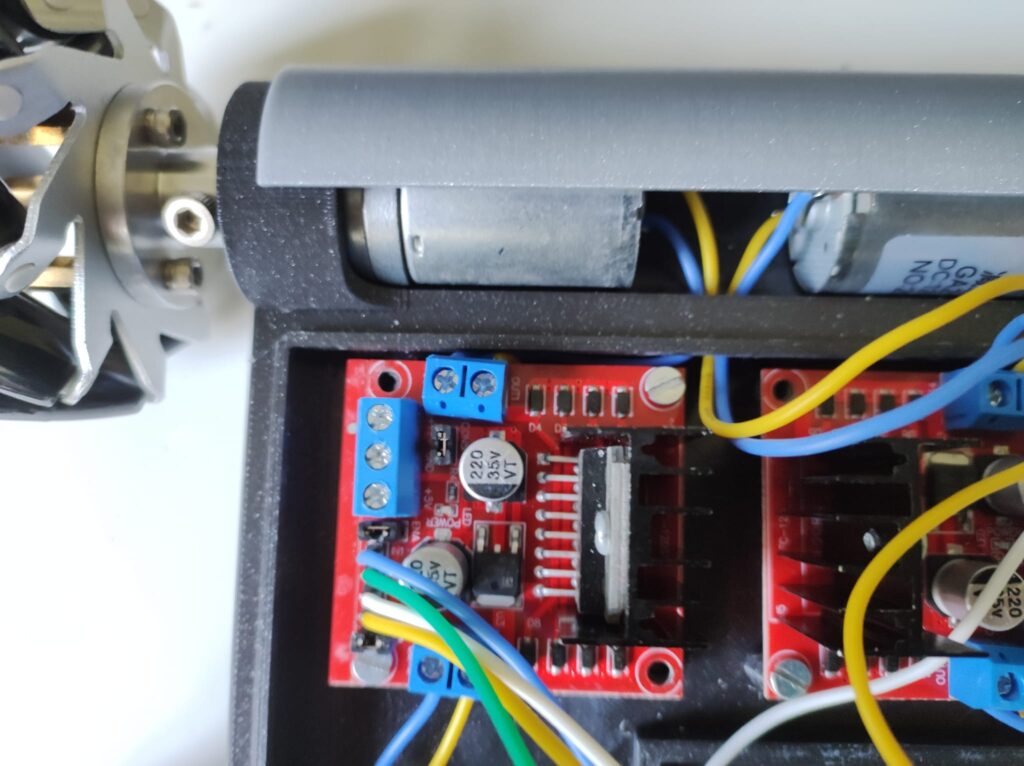
- Driver de Moteur : Essentiel pour contrôler les moteurs, ce composant gère la direction et la vitesse, assurant un mouvement précis. J’ai utilisé des divers basées sur un L298N car ils sont simple à programmer et ne sont pas cher ( https://fr.aliexpress.com/item/1005006739178065.html?spm=a2g0o.productlist.main.21.91efj16gj16gUT&algo_pvid=b9d658ce-0bb1-4b5e-80f9-a115d4c9222c&utparam-url=scene%3Asearch%7Cquery_from%3A ) !
- Moteurs 282t/min : Ces moteurs fournissent une vitesse adéquate pour les déplacements rapides tout en offrant suffisamment de couple pour des manœuvres précises. J’ai choisi des JGA25-370 en 12 volts (https://fr.aliexpress.com/item/1005006642012561.html?spm=a2g0o.order_list.order_list_main.11.4a595e5b1c3eIi&gatewayAdapt=glo2fra ).
Il faut compter environ 20 euros pour les 4 moteurs.
Alimentation par LIPO 1300 3S
Le robot est alimenté par une batterie LIPO 1300 3S, offrant une bonne autonomie et une puissance stable. Ce type de batterie est léger et compact, parfait pour des applications robotiques nécessitant une grande densité d’énergie. Environ 15 euros pour la batterie (https://www.amazon.fr/Batterie-1300mAh-connecteur-Connection-Airplane/dp/B016Q3QQ3O/ref=sr_1_2_sspa?sr=8-2-spons&sp_csd=d2lkZ2V0TmFtZT1zcF9hdGY&psc=1 ).
Conclusion
Maintenant, il est temps de m’atteler à la programmation de l’électronique. C’est là que la magie opère… ou que les câbles s’emmêlent !
J’en suis au final à environ 100 euros. Bien sûr, à ce prix-là, vous pouvez en avoir un directement tout fait, mais ici, nous avons uniquement du standard (ESP, Drivers, …) , ce qui le rend facilement customisable et évolutif. Restez connectés pour la suite de cette aventure technique !